



















| 产地 | 江苏 |
|---|---|
| 产品认证 | ISO9001-2000 |
| 额定电流 | 1A/5A |
| 额定电压 | 100V |
| 上市时间 | 2001 |
| 品牌 | 荣信 |
| 型号 | DEA9221数字式变压器差动保护装置 |
| 加工定制 | 是 |

本装置主要用于110KV及以下电压等级容量为6300KVA及以上的变压器保护,其主要功能如下:
1保护功能1)两侧或三侧差动
2)偶次谐波制动原理的比例差动保护
3)差动速断保护
4)差流越限告警
5)TA断线判别
6)采集非电量保护动作信息
2其他功能1)装置参数远方查看
2)装置开入状态远方查看
3)保护定值远方查看、修改
4)保护功能压板远方查看、投退
5)装置运行状态远方查看(包括装置自检信息和动作信息)
6)装置远方复归
7)故障录波数据上传
8)GPS对时(分脉冲,秒脉冲或IRIG-B方式)
3原理说明3.1模拟量输入
外部电流及电压输入经隔离互感器隔离变换后,由低通滤波器输入至模数变换器, CPU经采样数字处理后,构成各种保护继电器。
Iah、Ibh、Ich为主变高压侧保护用模拟量输入,Iam、Ibm、Icm为主变中压侧保护用模拟量输入,Ial、Ibl、Icl为主变低压侧保护用模拟量输入。当用于两卷变时,装置的中压侧不用接线,并且把中压侧平衡系数整定为0。装置以高压侧二次电流为基准,其他侧的电流均折算到高压侧后再进行差流和制动电流的计算。由于装置内部的差流为“向量和”计算,因此要求外部的TA按照反极性接入到保护装置中。装置定值有主变绕组连接组别选择,可以通过软件对相位进行校准。如果通过装置软件对相位校准,那么要求外部TA必须是Y型接线。如果通过外部的TA接线来校准相位,那么装置内部该侧相应的组别连接方式应该整定为Y。
3.2软件说明
3.2.1偶次谐波制动原理的比例差动保护
IAzd—A相制动电流;
ΔIA —A相差电流;
ΔIAF2-A相差电流偶次谐波幅值;
ΔIAF3-A相差电流三次谐波幅值;
K2-偶次谐波制动系数(定值);
K3-三次谐波制动系数(定值);
Icd—差动定值;
Ig —拐点电流值。
拐点电流为0.7倍的额定电流Ie。
制动系数K可整定。
3.2.2 A相比例差动保护动作方程
装置采集三侧各相的原始电流(A相高压侧电流Hia,B相高压侧电流Hib,C相高压侧电流Hic,A相中压侧电流Mia,B相中压侧电流Mib,C相中压侧电流Mic,A相低压侧电流Lia,B相低压侧电流Lib,C相低压侧电流Lic)。考虑到变压器接线方式、变压器各侧电压等级、TA接线方式,TA变比和零序过流的因素,把原始电流变换成转换电流(A相高压侧转换电流Thia,B相高压侧转换电流Thib,C相高压侧转换电流Thic,A相中压侧转换电流Tmia,B相中压侧转换电流Tmib,C相中压侧转换电流Tmic,A相低压侧转换电流Tlia,B相低压侧转换电流Tlib,C相低压侧转换电流Tlic)。
IAzd = Max(Thia,Tmia,Tlia)
ΔIA = | Thia + Tmia + Tlia |
如果制动电流IAzd小于拐点电流Ig,A相动作方程为ΔIA>Icd
如果制动电流IAzd大于拐点电流Ig,A相动作方程为ΔIA>Icd+(IAzd-Ig)*K
3.2.3 A相偶次谐波和三次谐波制动差动保护动作方程
且
3.2.4比例差动保护采用分相差动
所以B相和C相差动的原理与A相的原理相同。
3.2.5差动速断保护
当任一相差电流大于差动速断定值时,装置跳闸。
3.2.6差流越限告警
当任一相差电流大于差流越限定值,经延时,装置发信。
3.2.7TA断线
变压器在额定电流下运行,任一侧的任一相TA断线时,装置可根据控制字发信或闭锁差动。
3.2.8整定计算
1)按下式计算变压器各侧额定电流,即一次侧的平衡电流。
式中:P — 变压器的额定容量(KVA),如各侧容量不等,应皆取容量最大侧的容量,接入差动回路的桥接线及厂用分支等也应采用相同的容量。U — 各侧额定线电压(KV),对于有调压分接头的相应侧一般采用中间抽头电压,如实际运行情况不可能改变抽头,即可取实际使用抽头的电压。
2)按下式计算各侧电流互感器二次侧的平衡电流Ib 。
式中:KLH — 电流互感器变比。
KJX — 接线系数,电流互感器为星形接线时KJX=1,为三角线接线时KJX=
3)变压器接线方式及TA平衡电流选择
装置内部可通过软件校准相位,故增加了变压器Y或△选择,此时要求外部TA均接成Y形接法。
如通过外部TA校准相位,则该侧必须选择为Y。TA平衡电流为高压侧电流互感器二次侧的平衡电流IHB 。(差动元件、差动速断元件以此为基准)
高压侧为Y时,Y侧的电流转换算法:
,
,
高压侧为Y时,△-11侧的电流转换算法:
,
,
高压侧为Y时,△-1侧的电流转换算法:
,
,
高压侧为△时,△侧的电流转换算法:
,
,
高压侧为△时,Y-11侧的电流转换算法:
,
,
高压侧为△时,Y-1侧的电流转换算法:
,
,
4)中压侧平衡系数及低压侧平衡系数分别为
高压侧平衡系数为1且不可整定。
5)差动元件的动作值一般取TA平衡电流(高压侧电流互感器二次侧额定电流) 的25%~50%。
6)差动速断元件的整定,动作值应满足三个条件:
a)小于中间变流器和电流互感器的饱和电流;
b)在最严重的外部故障的稳态不平衡电流下不误动;
c)躲过变压器的励磁涌流,在没有足够根据时不要整定大于12倍变压器额定电流,一般整定8~9倍变压器额定电流。
7)比例制动系数的整定
一般在0.5~0.7之间整定。
8)谐波制动比的整定
偶次谐波制动系数,一般在0.12~0.15之间整定。
三次谐波制动系数,一般在0.15~0.2之间整定。
3.2.9采集非电量保护动作信息
对于告警类的非电量保护,如轻瓦斯告警,超温告警,油位异常等不涉及跳开关的非电量保护,可直接接入本装置进行采集,并上传置自动化系统。
对于跳闸类的非电量保护,如重瓦斯跳闸,超温跳闸,压力释放跳闸等需要直接跳开关的非电量保护,应该将其接入本体保护装置,由本体保护装置跳开关。同时本体保护装置输出相应的动作接点接入本装置以记录动作情况,并由本装置将动作信息上传自动化系统。本装置共有12个开入量,可以采集并记录12个非电量保护的动作信息。
4定值表定 值 表 | ||||
序 号 | 定 值 名 称 | 单 位 | 范 围 | 备 注 |
1 | 变压器额定电流 | A | 0~200 | Ie |
2 | 差动保护定值 | Ie | 0~1 |
|
3 | 差动速断定值 | Ie | 0~20 |
|
4 | 比例制动系数 |
| 0.3~0.9 |
|
5 | 二次谐波制动系数 |
| 0.1~0.25 |
|
6 | 三次谐波制动系数 |
| 0.1~0.25 |
|
7 | 中压侧平衡系数 |
| 0~10 |
|
8 | 低压侧平衡系数 |
| 0~10 |
|
9 | 差流越限定值 | Ie | 0~1 | 一般为差动保护定值的50% |
10 | 差流越限延时 | S | 0.00~20.00 |
|
控 制 字 表 | ||||
序 号 | 控 制 字 名 称 | 选 项 | ||
1 | yyy | □退出 □投入 | ||
2 | ydd1 | □退出 □投入 | ||
3 | ydy1 | □退出 □投入 | ||
4 | yyd1 | □退出 □投入 | ||
5 | ydd11 | □退出 □投入 | ||
6 | ydy11 | □退出 □投入 | ||
7 | yyd11 | □退出 □投入 | ||
8 | dyy11 | □退出 □投入 | ||
9 | dyy1 | □退出 □投入 | ||
10 | 差动速断投退 | □退出 □投入 | ||
11 | 二次谐波制动投退 | □退出 □投入 | ||
12 | 三次谐波制动投退 | □退出 □投入 | ||
13 | A相差动投退 | □退出 □投入 | ||
14 | B相差动投退 | □退出 □投入 | ||
15 | C相差动投退 | □退出 □投入 | ||
16 | 差流越限告警投退 | □退出 □投入 | ||
17 | CT断线发信 | □退出 □投入 | ||
18 | CT断线闭锁差动 | □退出 □投入 | ||
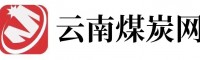
插件1X为交流插件,端子1X1~1X18为电流输入,其中端子1X1、1X2为主变高压侧保护TA的A相输入;端子1X3、1X4为主变高压侧保护TA的B相输入;端子1X5、1X6为主变高压侧保护TA的C相输入;端子1X7、1X8为主变低压侧保护TA的A相输入;端子1X9、1X10为主变低压侧保护TA的B相输入;端子1X11、1X12为主变低压侧保护TA的C相输入;端子1X13、1X14为主变中压侧保护TA的A相输入;端子1X15、1X16为主变中压侧保护TA的B相输入;端子1X17、1X18为主变中压侧保护TA的C相输入。
插件2X为电源插件,端子2X1为装置电源正极;2X2为装置电源负极;2X3为空端子;2X4为装置接地,与接地网相联。
插件3X为CPU插件,端子3X1为24V开入量公共端,装置自产24V电源为外部开入量提供正电源,开入量在装置内部共负。
端子3X2~3X5、3X8~3X15为外部非电量开入,不用跳闸的非电量可以直接接到差动保护的外部非电量开入中,由差动保护发信号到综合自动化系统的后台;而需要跳闸出口的非电量则接到本体保护中,由本体保护去跳闸,同时本体保护重动后接到差动保护的外部非电量开入中,由差动保护发信号到综自系统的后台。端子3X6为开入量电源自检,3X7为差动保护投入压板,这两个为开入量不可用作外部的普通开入量或者非电量。
端子3X16为GPS对时脉冲输入;3X17为485的“A”;3X18为485的“B”;3X19为GPS对时B码的“+”;3X20为GPS对时B码的“-”;CPU插件上的两个网口可组成双网通讯以确保通讯的可靠。
插件4X为出口插件,端子4X1~4X12为六付无源节点出口,可以在装置内部通过出口矩阵整定每一个出口的逻辑。
端子4X13~4X21为空,4X22为公共端,4X23为动作信号,4X24为告警信号。
6背板图







